Pixhawk系ハードウェア進化の歴史
2009
初代ArduPilot
- Arduinoベースのカスタムボード
- 16MHz 8bit ATMEGA CPU, 8KB RAM
- 水平線検出用のサーモセンサーのみ
- これ以降、いわゆるOilpanまで、Sparkfunが製造
2010
APM 1 (APM = ArduPilot Mega)
- Arduino MegaベースのArduPilot Mega + IMU(Inertia Measurement Unit)シールド
- 16MHz 8bit ATMEGA CPU, 8KB RAM, 256KB Flash (ATMEGA 2560)
- モーションセンサー、気圧センサー
- ボード2枚のサンドイッチ構造
2011
APM 2
- APM 1の小型改良版
- 入出力ポート、コプロセッサー追加
- 6DoFモーション(3軸ジャイロ、3軸加速度)センサー、高精度気圧センサー
- シングルボード
2012
APM 2.5/2.6
- APM 2の改良版
- 気圧センサー精度確保の為、ケーシングを追加
- APM 2.6は2.5に加え、ノイズ対策としてオンボードから外部コンパスに変更 (コンパス付きの3DR GPS uBlox LEA-6使用が前提)
- ソフトウェア的には限界が近いため、今後の機能追加は見込めない
2013
PX4FMU
 PX4-FMUv1
PX4-FMUv1- PX4-FMUv1は、PX4プロジェクト最初のボードで、(FMUとIO)の2ボード構成
- すぐにシングルボード版とも言えるPixhawkに置き換えられる
- 168MHz 32bit ARM Cortex M4 CPU, 256KB RAM, 2MB Flash (STM32-F4)
- 32 bit STM32F103 フェイルセーフ用コプロセッサー
- NuttXリアルタイムOS
PX4IO
- PX4FMU向けのIOボード
Pixhawk(PX4FMUv2)
 Pixhawk == PX4-FMUv2
Pixhawk == PX4-FMUv2- Pixhawkはスイス連邦大学チューリッヒ校(チューリッヒ工科大学: ETH Zurich)発のプロジェクト
- ハードウェアの製造パートナーとして3D Roboticsと提携
- ハードウェアもオープンソースであるため、多様なクローン・バリエーション・改良版が存在する
- 祖先としてDIYDrones/3DRoboticsが製造していたAPM (ArduinoベースのFC)と、PX4-FMUv1&PX4-IOがある
- Pixhawkは、PX4-FMUとPX4-IOを1つのボードにまとめたもので、型番もPX4-FMUv2 (FMU = Flight Management Unit)
- AR.Drone専用のPX4IOとして、PX4IOARもある
- 168MHz 32bit STM32F427 Cortex M4 プロセッサ、256KB RAM
- Pixhawkは、ヒロセのDF13コネクターを採用しているが、これはサーフェースマウント用のコネクターであり、頻繁に抜き差しすることは想定されていないため使いにくく、新しい設計はJSTのGHシリーズやClickMate等に移行しつつある
2014
Pixhawk Fire Cape (PXF)
 Pixhawk Fire (PXF)
Pixhawk Fire (PXF)- BeagleBone Blackのケープ(シールド/拡張ボード)として、Linux上でAPMを走らせる目的で開発された
- オープンソースハードウェアで、スペインのErle Roboticsが製造
- 加速度センサー、ジャイロ、コンパスそれぞれ3ユニットずつ搭載
- 1GHz 32bit ARM Cortex-A8, 512MB RAM, 4GB Flash (AM335x)
2015
Erle-brain
 ErleBrain
ErleBrain- BeagleBone Black + PXFのシングルケースパッケージ版
Pixhawk 2 (PX4FUMv3、3DR版)
- 3DR Solo専用
- ハードはオープンソースであるが、3DRが単体発売しなかったため、世界各地で生産されたコミュニティー版が発売される予定
2016
Erle-brain 2
 ErleBrain 2
ErleBrain 2- Raspberry Pi 2 + PXF2
PXFmini
 PXFmini
PXFmini- Raspberry Zero向けのボード
- ロック付きのJST GH コネクタ採用
NAVIO2
 NAVIO 2
NAVIO 2- Raspberry Pi 2ベースのFC
SnapDragon Flight
 SnapDragon Flight
SnapDragon Flight- QualcommnのLinuxボード
- Quad-core 2.26 GHz Krait, 2GB LPDDR3 PoP @931 MHz, 32GB eMMC Flash
- GPU、WiFi搭載
- 現時点ではPX4 Native Stackのみが正式にサポート
PixRacer
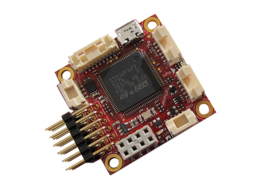 Pixracer == XRacer V1 == PX4-FMUv4
Pixracer == XRacer V1 == PX4-FMUv4
- PX4公式ボードとしてPX4-FMUv4の型番が与えられた
- Pixhawkに改良を加えて、小型化
- Nick Arsov & Phillip Kocmoudが設計
- AUAVが製造
- 250クラスのドローンレーサーに載せるため、CC3D, NAZE等の小型ボードとほぼ同サイズに小型化
- Pixhawkから各部改良(CPU、RAM、センサー等)
- ロック付きのJST GH コネクタ採用
- WiFi搭載
Pixhawk 2 (コミュニティー版)
- 3DRが単体発売をしなかったため、ハードウェアのデザイナーと有志が世界各地の生産工場と提携して製造、販売を計画
- Pixhawkの問題点であった入手性とクローンの品質問題が解決されることを期待
- 形状は正方形(Cube)で、DF17コネクター経由でエキスパンジョンボードに接続
Pixhawk Mini
- HolybroとHobbyKingが開発し、3DRが販売
- Pixfalconの改良版
- Pixhawk 1よりも性能の良いセンサーや部材を使用
- 2016年10月発売